 中文
中文 English
English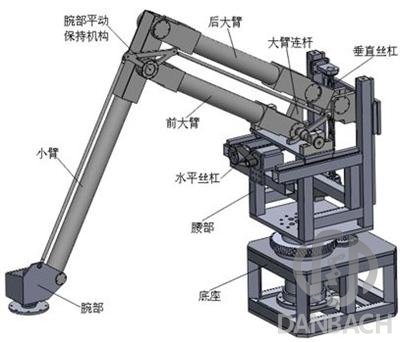
碼垛機器人是用在工業生產過程中執行大批量工件、包裝件的搬運、碼垛、拆垛等任務的類工業機器人, 是集機械、電子、信息、智能技術、計算機科學等學科于體的機電產品。碼垛機器人控制系統實現了機器人對貨物的抓取、提升、輸送、放置和返回等功能,以動畫形式顯示現場操作,使用形象、簡單、便捷。
1、技術特色
■四軸高速、高精度同步控制
■高精度定位,累積誤差小于2mm
■搬運軌跡平滑無抖動
■支持多路徑優化,可為多條生產線同時碼垛
■可通過三維動畫仿真機器手動作
■支持示教功能,對運行軌跡進行校準
2、系統功能
機器人由4個主動軸與個機械手組成,其中主動軸電機由伺服器驅動,機械手由氣動夾組成,通過氣泵驅動。由1個高速DO控制伺服器的運行位置和速度,1個DO信號控制電機運行方向,1個DI信號指示每個軸的原點,4個DI信號連接正負限位開關與正負限限位開關,使用2個DI和1個DO控制氣動夾壓力,由2個DI采集來貨信號。系統共需要4個高速DO、6個DO、22個DI。采用1個PAC可編程運動控制器iTC1012與2個擴展模塊DEM3000組成控制系統,在iTC1012上運行實時內核和軟PLC、軟NC程序,通過D-BUS進行數據通信實現I/O變量刷新,通過DEM3000的高速脈沖輸出和輸入輸出能力實現機器人的網絡化控制。使用PLC_Config編程軟件開發機器人控制程序,實現了多軸高速同步、搬運軌跡抖動抑制、高精度定位等功能。操作界面采用DView組態軟件編寫,實現軌跡示教、參數設定、三維仿真等功能。
-

-
工廠自動化整體解決方案提供商
服務至上 ● 誠信誠心
- 全國服務咨詢熱線
- 400-697-1188
