 中文
中文 English
English視覺導航是通過對視覺傳感器獲取的圖像進行相應處理從而得到載體導航參數的種技術。
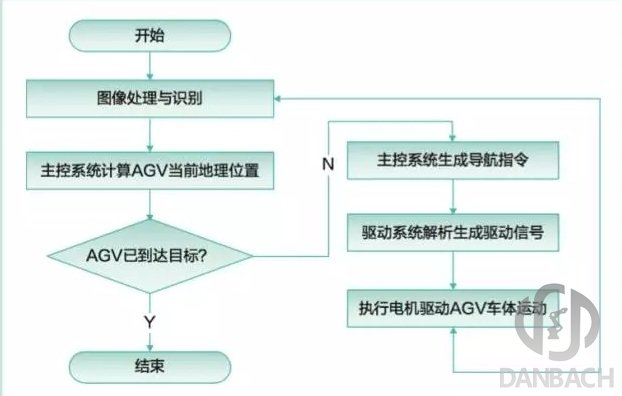
視覺導航原理:視覺導航是在AGV的行駛路徑上涂刷與地面顏色反差大的油漆或粘貼顏色反差大的色帶,在AGV上安裝有攝圖傳感器將不斷拍攝的圖片與存儲圖片進行對比,偏移量信號輸出給驅動控制系統,控制系統經過計算糾正AGV的行走方向,實現AGV的導航。
視覺導航優點:AGV定位,視覺導航靈活性比較好,改變或擴充路徑也較容易,路徑鋪設也相對簡單,導引原理同樣簡單而可靠,便于控制通訊,對聲光無干擾,投資成本比激光導航同樣低很多,但比磁帶導航稍貴;
視覺導航缺點:路徑同樣需要維護,不過維護也較簡單方便,成本也較低。
-

-
工廠自動化整體解決方案提供商
服務至上 ● 誠信誠心
- 全國服務咨詢熱線
- 400-697-1188
