 中文
中文 English
English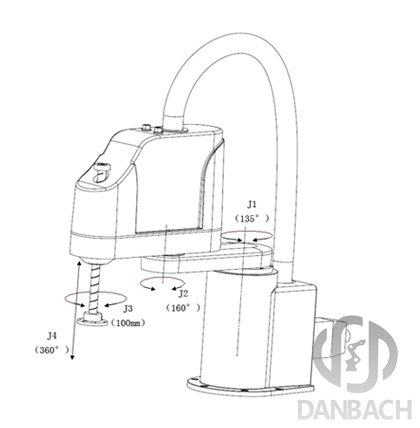
四軸機械手是特別為高速取放作業而設計的。 小型裝配機器人中,“四軸機器人”是指“選擇性裝配關節機器臂”,即四軸機器人的手臂部分可以在個幾何平面內自由移動。
機械手的前兩個關節可以在水平面上左右自由旋轉。第三個關節由個稱為羽毛的金屬桿和夾持器組成。該金屬桿可以在垂直平面內向上和向下移動或圍繞其垂直軸旋轉,但不能傾斜。
這種獨特的設計使四軸機械手具有很強的剛性,從而使它們能夠勝任高速和高重復性的工作。在包裝應用中,四軸機械手擅長高速取放和其他材料處理任務。
目前內具有完全自主產權的多關節四軸機器人。適應工業場合,能夠穩定的長時間無故障運行,能夠大批量生產,價格上適應我情,滿足企業成本核算需求;適用于企業中簡單、重復的小載荷搬運工位,效率高,節省成本。系統擴展性強,參數配置簡單,易于維護,機器人語言指令系統簡單易學,能滿足絕大部分工業需求。
-

-
工廠自動化整體解決方案提供商
服務至上 ● 誠信誠心
- 全國服務咨詢熱線
- 400-697-1188
